"대규모 공연 및 방송을 위한 다중자율 비행체 협업 기반 첨단 촬영 및 렌더링 기술개발"
연구목표
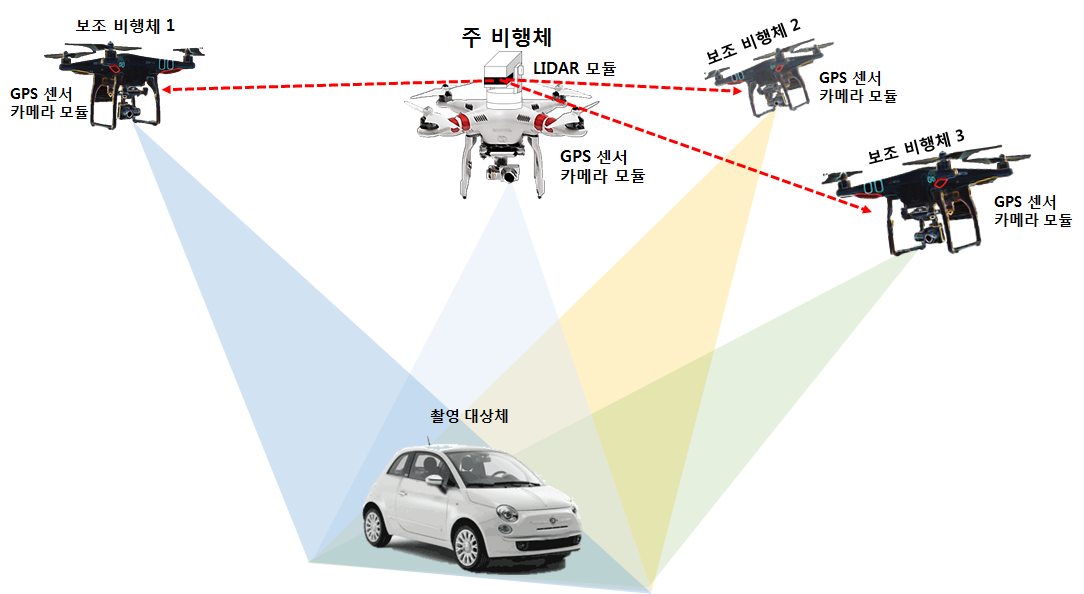
- 다시점 영상 촬영을 위한 무인 비행체의 항법제어 기술 및 최적 경로설계 기술 개발
- 드론의 위치추정 정확도: 0.5 미터 이내
- 드론의 자세추정 정확도: 3 도
- 드론의 위치제어 정확도: 위치 0.1 미터 이내
- 드론의 자제제어 정확도: 0.1 도
- 카메라 영상추적과 비행체 충돌회피를 위한 짐벌 기구부 제어기술 및 라이다 센서개발
- 짐벌기구부 제어 밴드: 10 Hz
- 짐벌기구부 제어 정확도: 0.1도
- 비행체 인식속도: 3 frame/sec
- 비행체 인식 정확도오차 : 0.1도
- 비행체의 위치/방향을 고려한 Deblurring 기술 개발
- 센서 정보를 이용하여 깊이 변화가 있는 영상 deblurring
연구내용
- 다시점 영상 기반 단일 객체 추적 모듈 개발
- 단일 비행체의 정밀 자세 및 위치 결정 기술
- 영상 촬영이 가능한 수준의 노이즈가 최소화된 단일 비행체의 호버링 및 이동 제어 기술 개발
- 최적 경로 생성 및 이미지 서보 트랙킹 기반의 다중 무인 비행체 제어 기술
- 카메라 영상추적과 비행체 충돌회피를 위한 짐벌 기구부 제어기술 및 라이다 센서개발
- 영상추적제어를 위한 3축 카메라 짐벌 기구부의 구성 및 제어
- 라이다 센서를 이용한 다중 자율비행체 및 장애물 위치 파악
- 센서 융합 및 영상추적제어
- 입력 영상 화질 개선
- 비디오 프레임 기반 고해상도 복원 알고리즘
- 데이터베이스 학습 기반 고해상도 복원 알고리즘
- Deblurring 기술 개발
- Rolling Shutter 보정 기술 개발
- 영상 기반 3차원 복원 기술
- 키프레임 기반 3차원 메쉬 재구성
- 복원 모델 최적화 및 텍스쳐 기술
활용방안
- 다중비행체를 활용한 실시간 다시점 영상 중계 및 녹화 서비스
- 공연 및 스포츠 등의 문화 콘텐츠에 대한 다양한 시점의 영상을 실시간으로 중계하고, 사용자의 요구에 따라 녹화할 수 있는 서비스
- 실내외 환경 복원을 통한 3차원 콘텐츠 뷰어 서비스
- 공연 및 스포츠 등의 문화 콘텐츠를 기록한 후 입체 렌더링 기법을 통해 새로운 형태로 재생산된 첨단 3차원 콘텐츠를 사용자가 확인할 수 있는 서비스
- 다중비행체를 이용한 다시점 영상 촬영 시스템 상용화
- 영화 및 TV 프로그램 등 영상 촬영 제작자들을 위한 다시점 영상 촬영 시스템 제공(다중 비행체 및 짐벌 기구부 등 자동 촬영 장비 제공)
- 라이다 센서를 적용한 편대 비행 가능한 비행체
- GPS가 불가능한 실내 상황에서도 편대 비행이 가능하도록 라이다 센서를 적용시킨 비행체 상용화