본문 바로가기
대메뉴 바로가기
open
멈춤
시작
이전
다음
오늘 하루 열지 않기
Close
전체메뉴
About
Members
Professor
Researcher
Ph.D. Student
M.S. Student
Intern
Alumni
Researcher
Intern
Project
Current
Past
Publication
Conference
Journal
Patents
Community
News
Gallery
Internship
Lecture
DBS
인공지능 연구실
About
Members
Professor
Researcher
Ph.D. Student
M.S. Student
Intern
Alumni
Researcher
Intern
Project
Current
Past
Publication
Conference
Journal
Patents
Community
News
Gallery
Internship
Lecture
DBS
닫기
Project
HOME
Project
Current
프린트
Current
게시물 검색
총 게시물
6
,
페이지
1
/ 1
-전체-
제목
작성자
페이지당 게시물수
10
20
30
50
적용
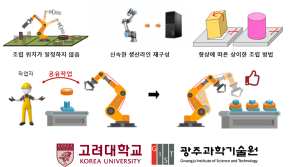
조립 작업과 같은 비정형 작업환경에 지능적으로 대응할 수 있는 심층강화학습 기반의 공유작업 기술 개발
작성자
Artificial Intelligence Laboratory
조회수
360
Shared autonomy based on deep reinforcement
등록일
2020-07-04 21:59:25
설치가 용이한 지능형 다관절 식사보조 로봇 개발, 2019-2021
작성자
Artificial Intelligence Laboratory
조회수
254
- Development of a Caring Robot with AI
등록일
2020-06-05 09:19:57
지속적 지능 증강 및 공유를 통한 클라우드 기반 로봇 복합 인공지능 핵심기술 개발 사업
작성자
Artificial Intelligence Laboratory
조회수
170
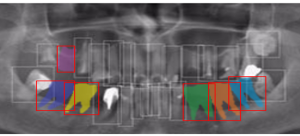
인공지능 임플란트 가이드 시뮬레이션 소프트웨어 및 수술용 가이드 시스템 개발
작성자
Artificial Intelligence Laboratory
조회수
148
Development of artificial intelligence implant g
등록일
2020-06-01 14:56:41
군집 자율운항 알고리즘 개발
작성자
Artificial Intelligence Laboratory
조회수
233
Develop Algorithm of Swarm USV Autonomous Navigate
등록일
2020-05-29 13:13:01
조립 작업과 같은 비정형 작업환경에 지능적으로 대응할 수 있는 심층강화학습 기반의 공유작업 기술 개발, 2020-2023
작성자
Artificial Intelligence Laboratory
조회수
146
"Shared autonomy based on deep reinforcement learn
등록일
2020-05-27 19:44:52
QUICK
MENU
GIST 대표
GIST대학
융합기술원
도서관